Version 1.2 Is Active

I began to see that one big problem I was having was the huge sandwich of silicone, wires on top of the robot were really messing it up! It could not balance well, and some of the stuff was not really needed. So I removed the Protoshield (I just put in a mini breadboard by itself), and moved everything into a small box I found. I was also able to just screw the Sharp Sensor into the box which was great too. I also removed the original “head”, and jury rigged a new base for the box (a flat one!) from an old applesauce container. Now it has a much lower profile. I set it free, and it moves better, although something is making it veer off to one side all the time, and unfortunately, it does not seem that it is weight right now, but I could be(hope I am) wrong. If need be, I could always offset the veer by making it turn slightly in the other way while it walks.
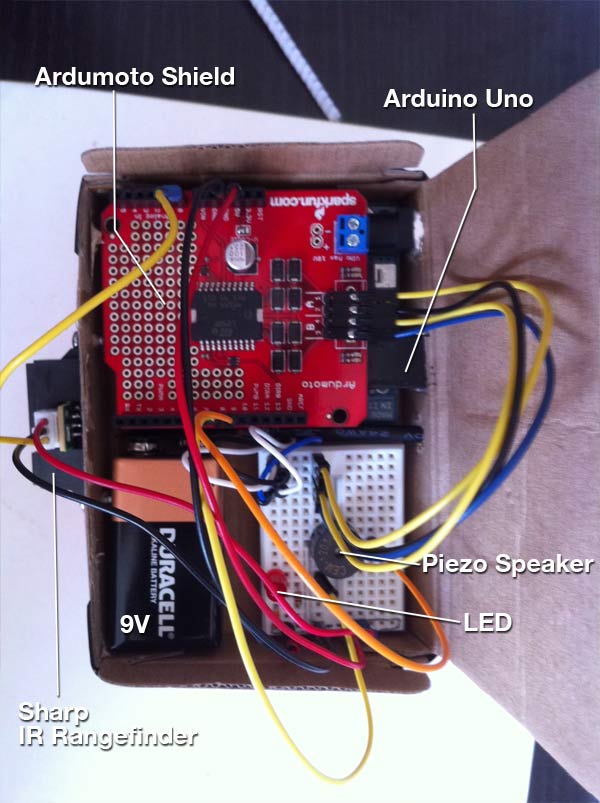
Here is what it currently has under the hood. Notice the super awesome Ardumoto shield, which was the key to getting this thing running. Also, notice there is no motor supply plugged in. This is because the board is managing to power both motors no problem, using the same 5v it sends to the logic board. Awesome for me!
What’s under the hood?
I also took a chance to see what my lab partner thought of it – you can see that here:
httpv://www.youtube.com/watch?v=UYdMVbSpLP8
Comments